Najważniejsze fakty o CAN w jednym miejscu
- CAN to seryjna sieć komunikacyjna, w której wiadomości mają priorytet, a nie klasyczne adresowanie punkt-punkt.
- W samochodach najczęściej spotkasz klasyczny CAN high-speed, CAN FD oraz wolniejsze odmiany komfortowe.
- Poprawna terminacja ma znaczenie krytyczne; w high-speed CAN końce linii zamyka się rezystorami 120 Ω.
- Do diagnozy przydają się pomiar rezystancji, oscyloskop i baza sygnałów, bo sam odczyt błędów OBD zwykle nie wystarcza.
- Najczęstszy błąd to mylenie problemu komunikacji z awarią samego czujnika albo modułu sterującego.
Czym jest CAN i dlaczego tak dobrze pasuje do auta
CAN powstał po to, żeby uprościć komunikację między elektroniką w pojeździe i ograniczyć ilość przewodów. Zamiast ciągnąć osobne linie do każdego urządzenia, moduły dzielą jedną wspólną sieć i wymieniają krótkie ramki danych. To podejście świetnie pasuje do samochodu, bo pozwala połączyć sterownik silnika, ABS, klimatyzację, licznik, czujniki i elementy komfortu bez budowania ciężkiej, drogiej wiązki.
Ja patrzę na CAN przede wszystkim jako na sieć priorytetów i filtrów. Każdy węzeł widzi wszystkie wiadomości, ale reaguje tylko na te, które są dla niego ważne. Dzięki temu układ jest prostszy w rozbudowie i bardziej odporny na zmiany niż klasyczne połączenia punkt-punkt. W praktyce to właśnie dlatego CAN wszedł na stałe do motoryzacji i utrzymał się również w automatyce przemysłowej, maszynach roboczych i wielu układach sterowania.
Ważne jest jeszcze jedno: sam CAN nie mówi, co oznacza konkretny bajt w ramce. Tę warstwę znaczeń opisują dopiero protokoły wyższego poziomu, na przykład CANopen w automatyce albo J1939 w pojazdach użytkowych. Gdy to rozumiesz, łatwiej oddzielić „jak dane płyną” od „co one znaczą”.
Skoro już wiesz, po co ten system w ogóle istnieje, warto zobaczyć, jak faktycznie przekazuje informacje między modułami.
Jak działa komunikacja i arbitraż ramek
W CAN nie ma jednego centralnego kierownika ruchu. Moduł nadaje, kiedy uzna, że sieć jest wolna, a sama wiadomość jest identyfikowana przez arbitration ID. Ten identyfikator nie jest adresem odbiorcy w klasycznym sensie. To raczej etykieta wiadomości, która mówi innym węzłom, jaką ma ona ważność i czy w ogóle mają ją przetwarzać.
Najciekawszy element działa tu w chwili, gdy dwa moduły chcą nadawać jednocześnie. CAN rozwiązuje to arbitrażem bitowym: wiadomość o wyższym priorytecie wygrywa, a niższy priorytet ustępuje bez niszczenia danych. To duża przewaga w samochodzie, bo komunikacja staje się przewidywalna. Gdy pojawia się pilna informacja, na przykład związana z bezpieczeństwem, ma ona pierwszeństwo przed mniej ważnymi sygnałami komfortu.
W praktyce oznacza to też, że wszystkie urządzenia „słyszą” wszystko, ale nie wszystko jest dla nich przeznaczone. Taki model broadcastu upraszcza projektowanie i pozwala łatwo dołączać kolejne moduły. Z punktu widzenia diagnostyki to bardzo przydatne, bo po jednej wiadomości można często ocenić nie tylko stan jednego czujnika, ale cały fragment systemu.
Gdy rozumiesz już mechanikę transmisji, łatwiej odróżnić klasyczny CAN od jego odmian i wybrać właściwy wariant do konkretnego zastosowania.Które odmiany CAN spotkasz najczęściej
W warsztacie i w przemyśle nie ma jednego „prędkościowego” CAN-u do wszystkiego. Różne wersje powstały po to, by pogodzić szybkość, odporność na zakłócenia i koszty okablowania. Poniżej zestawiam najważniejsze warianty, z którymi naprawdę warto się liczyć.
| Wariant | Typowa prędkość | Gdzie się sprawdza | Co warto o nim wiedzieć |
|---|---|---|---|
| High-speed CAN | 40 kbit/s do 1 Mbit/s, najczęściej 500 kbit/s | Układy napędowe, ABS, ECU, sieci główne w aucie | Najpopularniejsza odmiana, wymaga poprawnej terminacji i krótkich odgałęzień |
| Low-speed / fault-tolerant CAN | Do 125 kbit/s | Komfort, drzwi, lusterka, mniej krytyczne moduły | Lepsza odporność na część uszkodzeń, ale niższa przepustowość i inny sposób zakończenia |
| Single-wire CAN | 33,3 kbit/s lub 83,3 kbit/s | Specjalne lub starsze rozwiązania, gdzie liczy się niski koszt | Używa jednego przewodu, ale jest mniej odporna na zakłócenia |
| CAN FD | Klasyczny arbitraż, szybsza faza danych | Nowocześniejsze sterowniki i systemy z większymi pakietami danych | Przyspiesza przesył danych, ale wymaga zgodnego sprzętu po obu stronach |
Praktyczna wskazówka jest prosta: jeśli pracujesz przy zwykłej elektronice samochodowej, najczęściej spotkasz high-speed CAN. Jeśli trafiasz na starsze auta, wygodę albo układy mniej krytyczne, możesz mieć do czynienia z wolniejszą odmianą. W automatyce z kolei bardzo często pojawiają się warstwy wyższe, które nadają ramkom konkretny sens, zamiast zostawiać same surowe dane.
Od wyboru odmiany zależy też to, jak trzeba prowadzić przewody i gdzie szukać błędów, więc teraz przechodzę do fizycznej strony instalacji.
Jak poprawnie okablować i zakończyć sieć
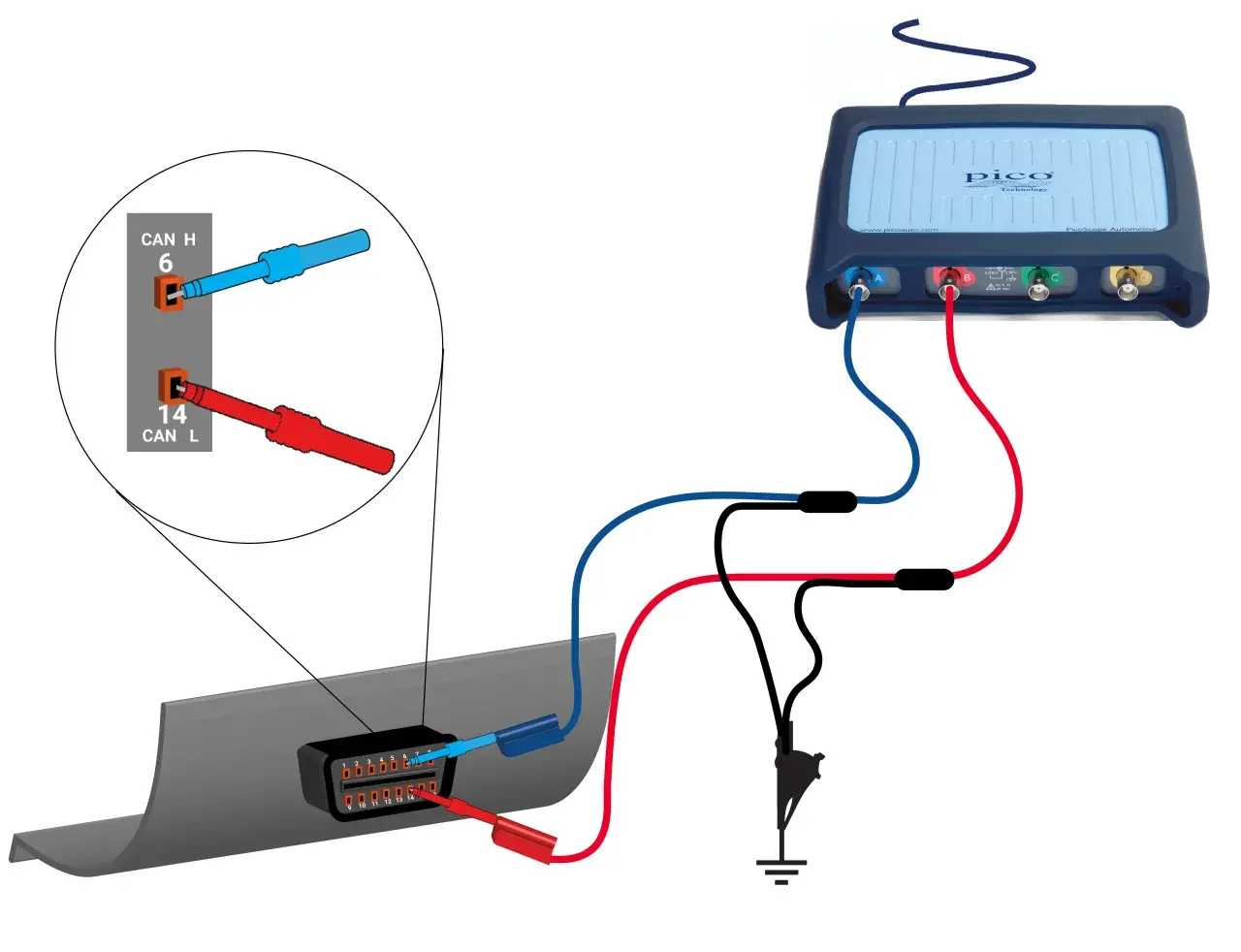
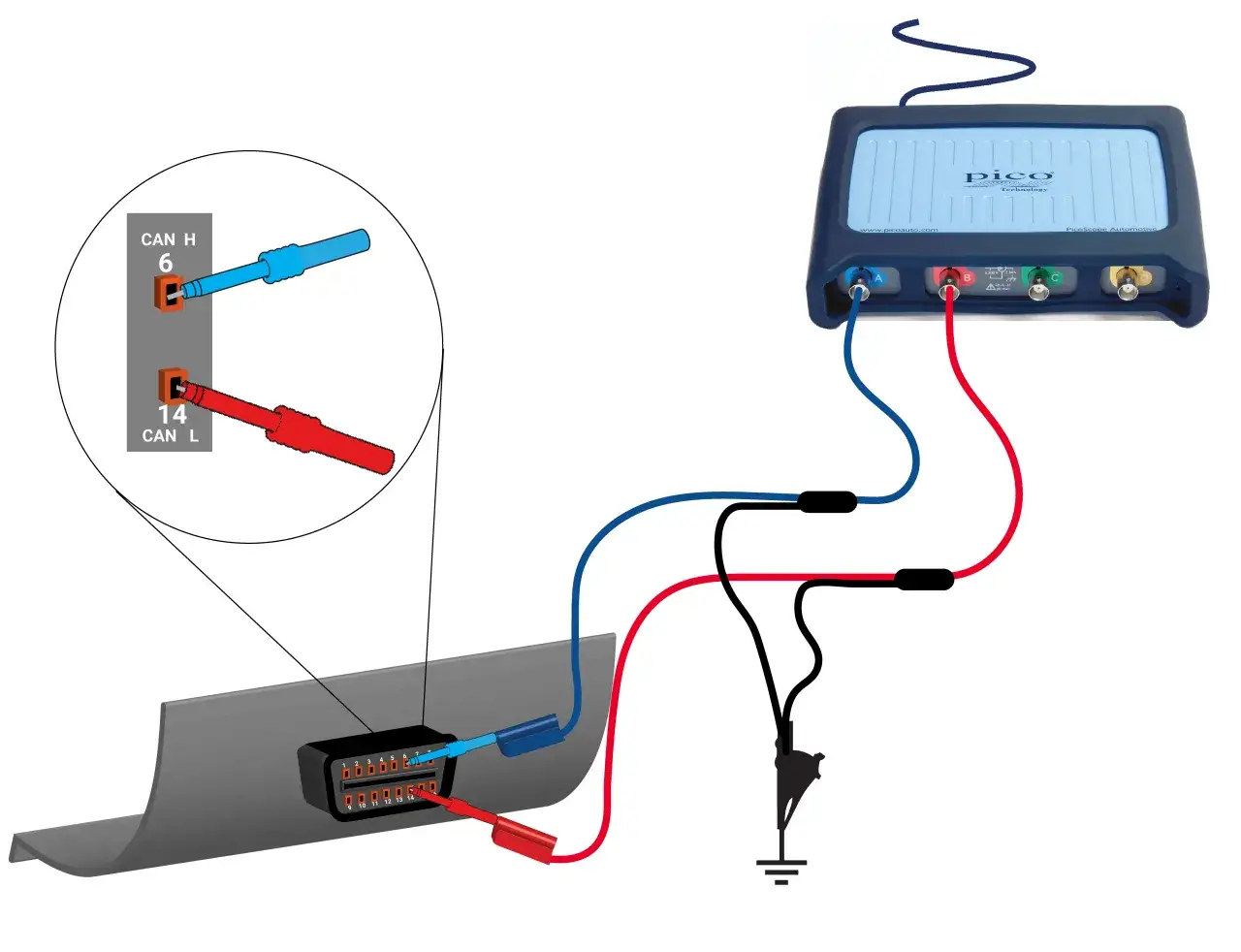
W CAN warstwa fizyczna nie jest dodatkiem, tylko częścią całego systemu. Najczęściej spotkasz skręconą parę przewodów CAN_H i CAN_L, bo takie prowadzenie lepiej znosi zakłócenia i pomaga utrzymać stabilny sygnał. Im wyższa prędkość, tym większe znaczenie mają długość linii, jakość połączeń i sposób terminacji.
W klasycznym high-speed CAN rezystory terminujące montuje się na obu końcach magistrali. W poprawnie zakończonej, odłączonej sieci zwykle zobaczysz około 60 Ω między CAN_H i CAN_L, bo dwa rezystory 120 Ω pracują równolegle. Jeśli pomiar pokazuje wyraźnie inną wartość, to już jest sygnał ostrzegawczy: gdzieś brakuje terminacji, jest zwarcie, przerwa albo nieprawidłowy odcinek przewodu.
Ja przy instalacji zwracam uwagę na cztery rzeczy, które najczęściej robią różnicę:
- Końce magistrali powinny być jedynymi miejscami terminacji w high-speed CAN.
- Odgałęzienia muszą być możliwie krótkie, bo długie „odnogi” powodują odbicia sygnału.
- Bitrate musi być zgodny po obu stronach, inaczej sterowniki nie zrozumieją się nawzajem.
- Masa i złącza muszą być pewne, bo korozja lub luźny pin potrafią udawać uszkodzony sterownik.
Warto pamiętać, że odmiany wolniejsze, zwłaszcza fault-tolerant CAN, mogą mieć inne zasady zakończenia niż klasyczny high-speed CAN. Dlatego przy diagnozie nie wolno zakładać, że jeden pomiar i jeden schemat pasują do każdej wersji. Gdy warstwa fizyczna jest uporządkowana, znacznie łatwiej odczytać, co naprawdę dzieje się w danych.
Jak czytać ramki i odróżniać je od sygnałów
Tu najczęściej pojawia się nieporozumienie. Ramka to paczka danych przesyłana po sieci, a sygnał to konkretna informacja wyciągnięta z tych bajtów, na przykład prędkość pojazdu, pozycja pedału albo status błędu. Bez mapy sygnałów widzisz tylko surowe bajty, które na pierwszy rzut oka niewiele mówią.
Dlatego w diagnostyce tak przydaje się baza opisów, na przykład plik DBC. To ona mówi, który bit odpowiada za jaką wartość, jak przeliczyć dane na jednostki fizyczne i gdzie kończy się jeden sygnał, a zaczyna drugi. Dla mnie to ogromna oszczędność czasu, bo zamiast zgadywać, czy bajt 4 oznacza temperaturę, stan wejścia czy licznik błędów, od razu widzę sens komunikatu.
W praktyce warto zapamiętać trzy rzeczy:
- Identyfikator ramki jest ważniejszy niż jej „adres”, bo steruje priorytetem i interpretacją.
- Nie każdy błąd komunikacji oznacza uszkodzony czujnik, bo problem może leżeć w przewodzie, terminacji albo zgodności konfiguracji.
- Oscyloskop i interfejs CAN pokazują więcej niż sam tester OBD, zwłaszcza gdy problem jest niestabilny i pojawia się tylko okresowo.
Jeśli rozumiesz różnicę między ramką a sygnałem, możesz zacząć diagnozować sieć metodycznie, zamiast wymieniać elementy na ślepo. To prowadzi do najważniejszej części: co sprawdzić najpierw, gdy komunikacja zaczyna się sypać.
Co sprawdzam najpierw, gdy komunikacja zaczyna szwankować
W elektryce samochodowej lubię zaczynać od rzeczy prostych, bo to one najczęściej ujawniają źródło problemu. Zanim podejrzę sam sterownik, sprawdzam zasilanie, masę, terminację i zgodność konfiguracji. To szybciej od razu wycina połowę fałszywych tropów.
- Sprawdzam zasilanie i masy modułu - bez nich CAN nie będzie działał poprawnie, nawet jeśli przewody danych są w porządku.
- Mierzę opór między CAN_H i CAN_L - odłączona, prawidłowo zakończona sieć zwykle pokazuje około 60 Ω.
- Oglądam złącza i wiązkę - szukam korozji, luźnych pinów, przetarć i miejsc, gdzie przewód był zbyt mocno zagięty.
- Weryfikuję bitrate i zgodność wersji - błędna konfiguracja potrafi udawać poważną awarię sprzętu.
- Patrzę na objawy bus-off - jeśli sterownik odcina się po serii błędów, przyczyna może leżeć w warstwie fizycznej, a nie w samym ECU.
- Dopiero na końcu podejrzewam moduł - to rozsądniejsze niż wymiana elementu, który jest tylko ofiarą problemu w sieci.
Najczęstszy błąd, który widzę, to mylenie znikających ramek z całkowitym brakiem komunikacji. Czasem problem pojawia się tylko pod obciążeniem, po nagrzaniu albo przy skręcie wiązki, więc test statyczny na stole nie ujawnia wszystkiego. Właśnie dlatego przy CAN tak dobrze działa połączenie prostych pomiarów z obserwacją danych w czasie rzeczywistym.
Gdybym miał zostawić jedną praktyczną zasadę, brzmiałaby tak: najpierw porządek w warstwie fizycznej, potem analiza ramek, a dopiero na końcu wymiana modułów. W CAN to podejście oszczędza czas, pieniądze i nerwy, a przy okazji pozwala szybciej odróżnić zwykłą usterkę instalacji od realnej awarii elektroniki.