
Najważniejsze rzeczy o magistrali CAN w samochodzie
- CAN łączy sterowniki auta w jedną sieć, dzięki czemu czujniki i moduły wymieniają krótkie wiadomości zamiast ciągnąć osobne przewody do wszystkiego.
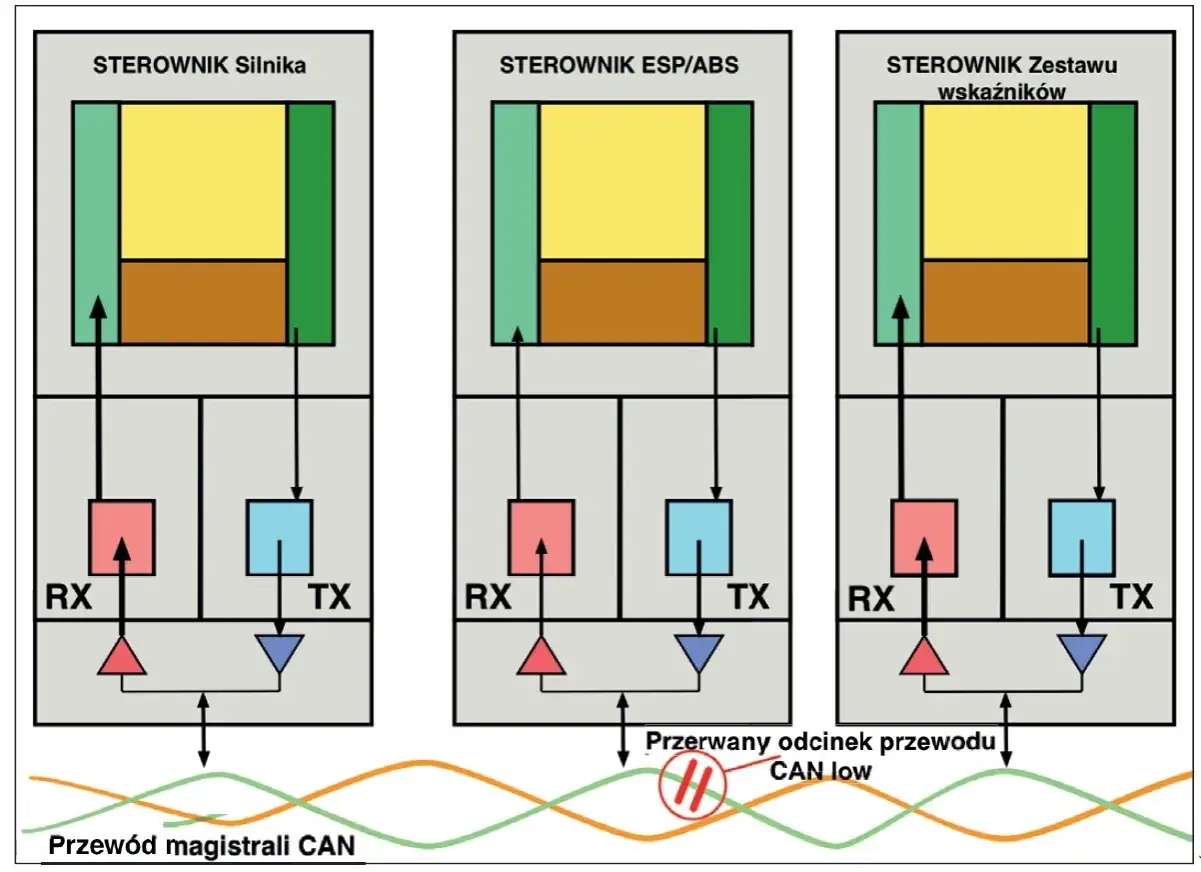
- Komunikacja odbywa się na dwóch przewodach, zwykle oznaczonych jako CAN-H i CAN-L, a sygnał ma charakter różnicowy.
- Priorytet wiadomości zależy od identyfikatora ramki, więc ważniejsze komunikaty mają pierwszeństwo bez „zderzania się” pakietów.
- W klasycznym CAN ramka danych ma do 8 bajtów, a w CAN FD nawet do 64 bajtów.
- W zdrowej instalacji często da się zmierzyć około 60 Ω między CAN-H i CAN-L przy wyłączonym zapłonie, jeśli na obu końcach są terminatory 120 Ω.
- Najczęstsze awarie to zwarcie, przerwa w przewodzie, problem z masą albo moduł, który nie przechodzi w uśpienie.
Co to jest magistrala CAN i po co w ogóle istnieje
W nowoczesnym aucie nie ma sensu prowadzić osobnego, grubego okablowania do każdego czujnika i każdego sterownika. CAN, czyli Controller Area Network, rozwiązuje ten problem: zamiast punkt-punkt mamy wspólną sieć, w której moduły wysyłają do siebie krótkie ramki z informacją, a nie pełne bloki danych. Ja patrzę na to jak na wewnętrzny język samochodu, zrozumiały dla sterownika silnika, ABS-u, licznika czy klimatyzacji.
Najważniejsza zaleta jest prosta: różne urządzenia mogą komunikować się przez tę samą magistralę bez centralnego „dyspozytora”. Każdy węzeł może nadawać i odbierać wiadomości, a priorytet rozstrzyga się technicznie, nie uznaniowo. Dzięki temu CAN dobrze znosi pracę w środowisku samochodowym, gdzie liczy się odporność na zakłócenia, deterministyczna komunikacja i sensowne koszty instalacji.
W praktyce to właśnie dlatego sieć CAN stała się standardem w elektronice pojazdów. Jest wystarczająco szybka do sterowania i diagnostyki, a jednocześnie prostsza i bardziej odporna niż wiele innych rozwiązań stosowanych w aucie. Następny krok to zrozumienie, jak ten system naprawdę „rozmawia” po dwóch przewodach.
Jak działa komunikacja na dwóch przewodach
Fizycznie CAN opiera się zwykle na skręconej parze przewodów: CAN-H i CAN-L. To nie jest zwykły sygnał względem masy, tylko sygnał różnicowy, czyli taki, w którym odbiornik porównuje napięcie między przewodami. Taki układ lepiej znosi zakłócenia z alternatora, zapłonu, silników elektrycznych czy długich wiązek poprowadzonych przez całe auto.
Najważniejszy detal, który często umyka początkującym, to fakt, że priorytet ma wiadomość, a nie urządzenie. Ramki mają identyfikator, a podczas jednoczesnego nadawania wygrywa ta o wyższym priorytecie. W praktyce oznacza to, że np. komunikat związany z bezpieczeństwem może przebić mniej pilne dane o komforcie czy statusie wyposażenia.
- W klasycznym CAN ramka danych ma maksymalnie 8 bajtów.
- W CAN FD jedna ramka może przenosić do 64 bajtów danych.
- Typowe szybkości klasycznego CAN to 125, 250, 500 kbit/s oraz 1 Mbit/s.
- Terminatory 120 Ω montuje się na końcach magistrali, a w sprawnym układzie ich równoległe połączenie daje zwykle około 60 Ω.
Warto też rozróżnić dwa pojęcia: controller obsługuje protokół i logikę ramek, a transceiver zamienia sygnały logiczne sterownika na poziom elektryczny odpowiedni dla przewodów. Ta różnica jest istotna przy naprawach, bo uszkodzenie transceivera potrafi unieruchomić sieć mimo tego, że sam sterownik „żyje”. Z takim spojrzeniem łatwiej zrozumieć, gdzie CAN pracuje w realnym aucie.
Gdzie CAN pracuje w aucie na co dzień
Sieć CAN nie obsługuje jednego konkretnego elementu. Ona spina całe środowisko pojazdu, a to oznacza, że ten sam przewód może pośrednio obsługiwać kilka zupełnie różnych układów. W praktyce spotykam ją wszędzie tam, gdzie sterowniki muszą wymieniać szybkie, powtarzalne informacje.
- Sterownik silnika wymienia dane o obrotach, obciążeniu, temperaturze i błędach.
- ABS i ESP przekazują informacje o prędkości kół, poślizgu i interwencji układów stabilizacji.
- Zestaw wskaźników dostaje dane do licznika, kontrolek i komunikatów na ekranie.
- Moduł komfortu obsługuje centralny zamek, szyby, oświetlenie i część funkcji nadwozia.
- Systemy bezpieczeństwa, takie jak poduszki powietrzne, wymagają szybkiej i przewidywalnej komunikacji.
W nowszych autach na jednej platformie często działa kilka różnych magistral, a CAN bywa ich kręgosłupem. Dla użytkownika oznacza to tyle, że usterka jednego modułu potrafi wywołać pozornie niepowiązane objawy gdzie indziej. Gdy widzę jednocześnie problemy z licznikiem, zamkiem i błędami komunikacji, nie zakładam od razu trzech osobnych awarii. Zaczynam od sprawdzenia, czy nie padła wspólna sieć albo bramka łącząca różne segmenty instalacji.
To prowadzi do kolejnego, bardzo praktycznego pytania: czym CAN różni się od innych magistral, które spotkasz w samochodzie.
CAN, LIN i Automotive Ethernet różnią się zadaniem
W elektryce samochodowej nie wszystko musi działać na tym samym poziomie szybkości i kosztu. CAN jest złotym środkiem: szybszy i odporniejszy niż LIN, a prostszy i tańszy niż Automotive Ethernet. Dlatego w jednym aucie potrafią współistnieć wszystkie trzy rozwiązania, ale każde ma swoje miejsce.
| Technologia | Typowa rola | Szybkość | Plusy | Ograniczenia |
|---|---|---|---|---|
| CAN | Sterowanie, diagnostyka, komunikacja między sterownikami | Najczęściej do 1 Mbit/s w klasycznej wersji | Odporność, prostota, dobre wsparcie w motoryzacji | Mniejsza przepustowość niż Ethernet |
| LIN | Proste elementy komfortu i wyposażenia | Do 20 kbit/s | Tani, prosty, wystarczający do wolnych funkcji | Za wolny do bardziej wymagających zadań |
| Automotive Ethernet | Kamery, systemy wspomagania, szybka diagnostyka, multimedia | 100 Mbit/s i więcej | Bardzo duża przepustowość | Większa złożoność i wyższe wymagania wobec instalacji |
Z tej perspektywy widać, dlaczego CAN wciąż ma sens w 2026 roku. Nie zawsze potrzebujesz gigabitów. W sterowaniu nadwoziem, komunikacji między modułami i prostszej diagnostyce liczy się stabilność, przewidywalność i niski koszt wdrożenia. Ethernet bierze na siebie ciężkie dane, ale CAN nadal robi ogromną część codziennej pracy. Skoro już wiemy, gdzie pasuje, przejdźmy do tego, jak rozpoznać, że coś w sieci zaczyna szwankować.
Jak rozpoznaję typowe usterki magistrali
Najbardziej zdradliwe w CAN jest to, że objawy często wyglądają jak wiele oddzielnych problemów, choć przyczyna jest jedna. Jeden uszkodzony przewód, zaśniedziała masa albo moduł, który nie usypia sieci, potrafią wywołać lawinę błędów. Dlatego przy diagnostyce nie patrzę tylko na kody usterek, ale na cały obraz zachowania auta.
| Objaw | Co może oznaczać | Co sprawdzić najpierw |
|---|---|---|
| Wiele kontrolek naraz | Zakłócona komunikacja między modułami | Zasilanie, masy, błędy sieciowe, bramkę |
| Brak łączności z kilkoma sterownikami | Przerwa lub zwarcie na magistrali | Opór między CAN-H i CAN-L, ciągłość przewodów |
| Auto nie zasypia i rozładowuje akumulator | Jeden z modułów trzyma sieć aktywną | Pobór prądu spoczynkowego, moduły komfortu, akcesoria |
| Błędne wskazania licznika lub losowe komunikaty | Zakłócenia lub niezgodność ramek | Połączenia przy liczniku, wiązka, błędy po wymianie modułu |
W praktyce zaczynam od rzeczy prostych. Przy wyłączonym zapłonie i uśpionej sieci między CAN-H i CAN-L często powinno być około 60 Ω, jeśli instalacja jest poprawnie zakończona na obu końcach. Jeśli wynik jest wyraźnie inny, szukam przerwy, zwarcia albo dodatkowej terminacji dodanej przez kogoś „na szybko”. Sprawdzam też, czy przewody nie mają przebicia do masy albo do zasilania, bo to częstsze niż się wydaje.
Gdy układ elektrycznie wygląda poprawnie, a problemy nadal wracają, podejrzewam konkretny moduł, który wysyła błędne dane albo nie przechodzi w stan uśpienia. To dobry moment, żeby przejść od samej diagnostyki do bezpiecznego dołączania nowych urządzeń, bo właśnie tam pojawia się najwięcej amatorskich błędów.
Jak bezpiecznie dołożyć urządzenie do instalacji
Dodawanie akcesoriów do auta to ten moment, w którym łatwo zniszczyć stabilną sieć jednym nieprzemyślanym wpięciem. Dotyczy to zwłaszcza alarmów, modułów świateł, rejestratorów, interfejsów do licznika czy emulatorów różnych funkcji. Ja podchodzę do tego bardzo ostrożnie: najpierw identyfikuję, z jakiej magistrali korzysta dany moduł, a dopiero potem decyduję, czy w ogóle wolno się do niej podłączyć.
- Sprawdź dokumentację auta lub wiązki, zamiast zgadywać po kolorach przewodów.
- Ustal, czy urządzenie ma tylko słuchać danych, czy także je nadawać.
- Nie dokładaj przypadkowo terminatora 120 Ω, jeśli nie jesteś na końcu magistrali.
- Do testów używaj interfejsu CAN lub trybu nasłuchu, a nie „drapania” przewodów na chybił trafił.
- Dbaj o zasilanie i masę, bo wiele „usterek CAN” to tak naprawdę problem z zasilaniem modułu.
W samochodach osobowych najbezpieczniej jest korzystać z gotowych adapterów, dedykowanych wiązek albo modułów przeznaczonych konkretnie do danego modelu. Zwykłe wpięcie się w przewody bez zrozumienia topologii potrafi skończyć się błędami komunikacji, rozładowaniem akumulatora albo wyłączeniem ważnych funkcji. Szczególnie nie lubię sytuacji, w których ktoś podłącza akcesorium do gniazda diagnostycznego i oczekuje, że „jakoś to będzie” przez cały czas. OBD to punkt serwisowy, nie uniwersalne złącze do wszystkiego.
Jeśli chcesz zrobić to porządnie, traktuj instalację jak część układu sterowania, a nie zwykły przewód z prądem. Ta różnica oszczędza mnóstwo czasu przy późniejszej diagnostyce i ogranicza ryzyko, że po montażu pojawią się objawy zupełnie niepowiązane z nowym dodatkiem. Z tego właśnie wynika najważniejsza praktyczna lekcja z pracy z CAN.
Co zapamiętać, zanim zaczniesz grzebać przy sieci auta
W samochodzie magistrala CAN jest jednocześnie prosta i zdradliwa. Prosta, bo opiera się na jasnych zasadach: dwie linie, ramki, priorytety, terminacja. Zdradliwa, bo jeden błąd w wiązce potrafi rozsiać problemy po połowie auta. Dlatego przy naprawach zawsze zaczynam od zasilania, masy, ciągłości przewodów i pomiaru oporu sieci, a dopiero potem sięgam po bardziej złożone podejrzenia.
Najlepsze efekty daje spokojna diagnostyka, a nie wymiana modułów na ślepo. W praktyce dużo częściej psuje się połączenie, przewód albo słaby punkt masy niż sam protokół. Jeśli masz już doświadczenie z elektryką samochodową, CAN szybko stanie się dla ciebie logiczny. Jeśli dopiero zaczynasz, potraktuj go jak system, w którym każdy element wpływa na resztę i żadnego objawu nie warto lekceważyć.
Gdy trzymasz się tych zasad, łatwiej odróżnisz zwykłą usterkę instalacji od realnej awarii sterownika i unikniesz kosztownych, przypadkowych napraw.